The underwater arms race
The global undersea arms race is transforming not just navies but the engineering profession behind them. Workforce, digital capability and nuclear stewardship are now as strategically important as the platforms themselves.
The Naval Architect provides in-depth information on all aspects of vessel design, construction and engineering. Practical applications of latest technology and case studies are accompanied by analysis and foresights. Published every two months, the magazine covers everything from superyachts and short-hop ferries to tankers and heavy-lift vessels; from battery pack installations and sail-assisted solutions to LNG tank retrofits; and from offshore safety to warship resilience.

The global undersea arms race is transforming not just navies but the engineering profession behind them. Workforce, digital capability and nuclear stewardship are now as strategically important as the platforms themselves.

As the climate warms, there’s growing interest in transiting once unnavigable seas. Amy McLellan explores ways to support increased shipping in ice-affected waters.

More than a year after the containership Baltic III grounded on the remote Newfoundland coast during a severe storm, a wreck removal plan is finally in place, but the complex and challenging operation still has years to run, and important questions remain.

Welcome to the latest issue of The Naval Architect. I am honoured to have been elected President of RINA, and I would like to thank members for the confidence and trust you have placed in me.

Researchers address capability gaps in underwater navigation and perception.

Catriona Savage on the pace of change in her time as RINA president.

Team Nagapasa’s flat-bottomed catamaran ferry won the WFSA’s Maritime Student Design Competition, meeting the constraints of a shallow, hazard-prone river route with a design built for affordability and local construction.

Aker wins contract for CO2 terminal in Lithuania; and First battery-methanol-powered tug set to sail.

Evangelos Boulougouris on using artificial intelligence in ship design.

A report from Lloyd’s Register, Fuel for Thought: LNG for Cruise, says liquefied natural gas is established as the dominant alternative fuel in the sector by a considerable margin, evidenced by the fact that 30 LNG-fuelled cruiseships of 20,000GT and above are in service and a further 29 are on order. What does that mean for naval architects?
Read stories from across our global community, including our new specialist e-newsletters across Power & Sustainability, Ship Repair & Maintenance, Warship Technology, Ferries & Fast Craft and Offshore Technology.

Vessel owners of 10-year-old ships are going through a mid-life crisis. To retrofit or not to retrofit, that is the question? Can investments in energy savings be recovered in these not old, but not new ships.
The digital age is transforming the ship repair industry as online monitoring and digital twins linked to a burgeoning predictive maintenance regime takes hold.

Visibility is becoming increasingly critical as charterers must now calculate Scope 3 emissions from their supply chains. Speed optimisation is helping to reduce the total.
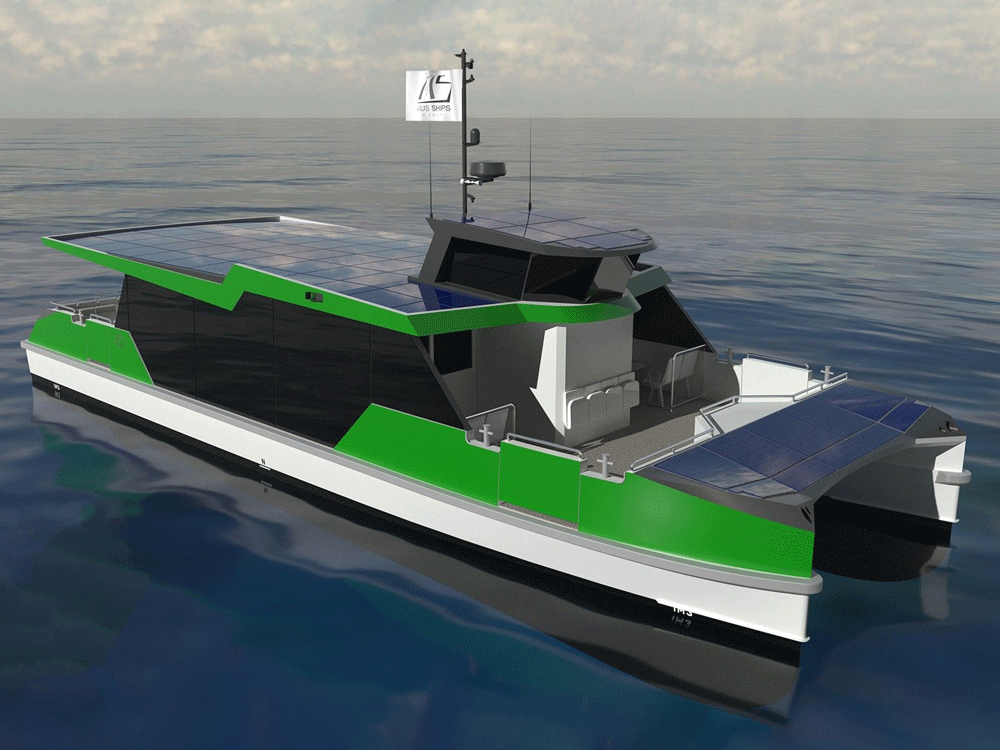
Australia’s first 100% electrically driven passenger ferry, a collaboration between Aus Ships and Volvo Penta, aims to validate scalable electric marine propulsion with the overall aim of decarbonising the country’s waterways.

Can diagonal deflector strakes solve the classic deep-vee compromise? Petestep’s hull technology is promising faster planing, lower slamming loads and efficiency gains across the fast craft market.

Battery specialist Corvus Energy discusses how it is working on large-scale battery integration projects that reshape weight distribution and stability design in high capacity ferries and fast craft.

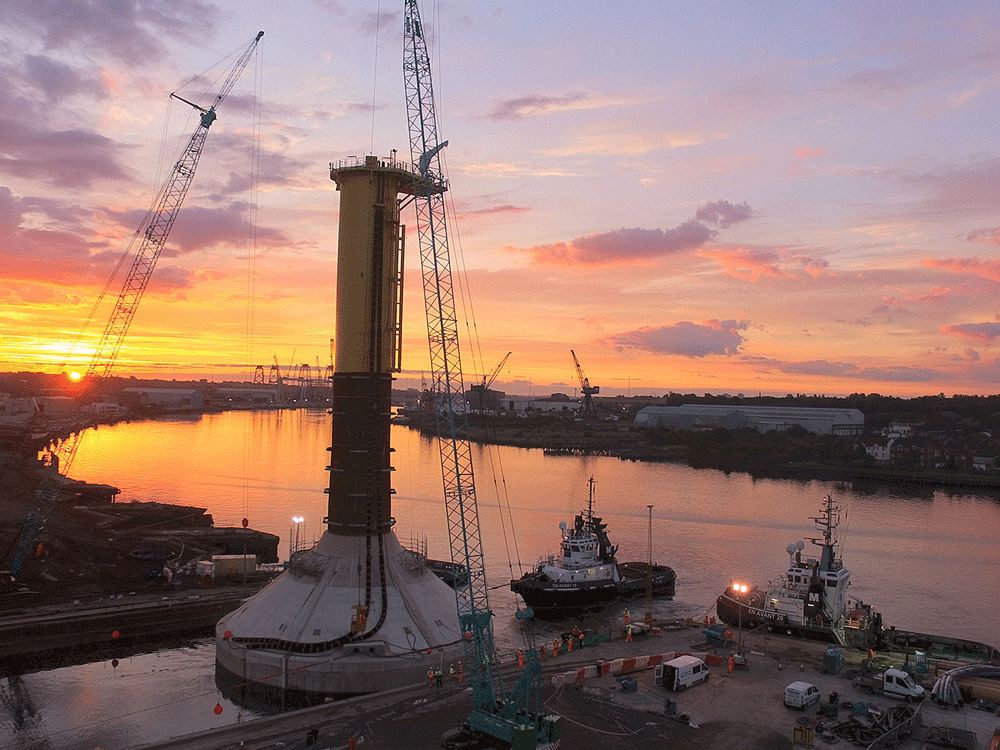
A new era in offshore power has seen the development of the first Energy Islands off European coasts. The first will be the six-hectare Princess Elisabeth Island, which is under construction 45km off the coast of Belgium and is due to be completed in 2028.
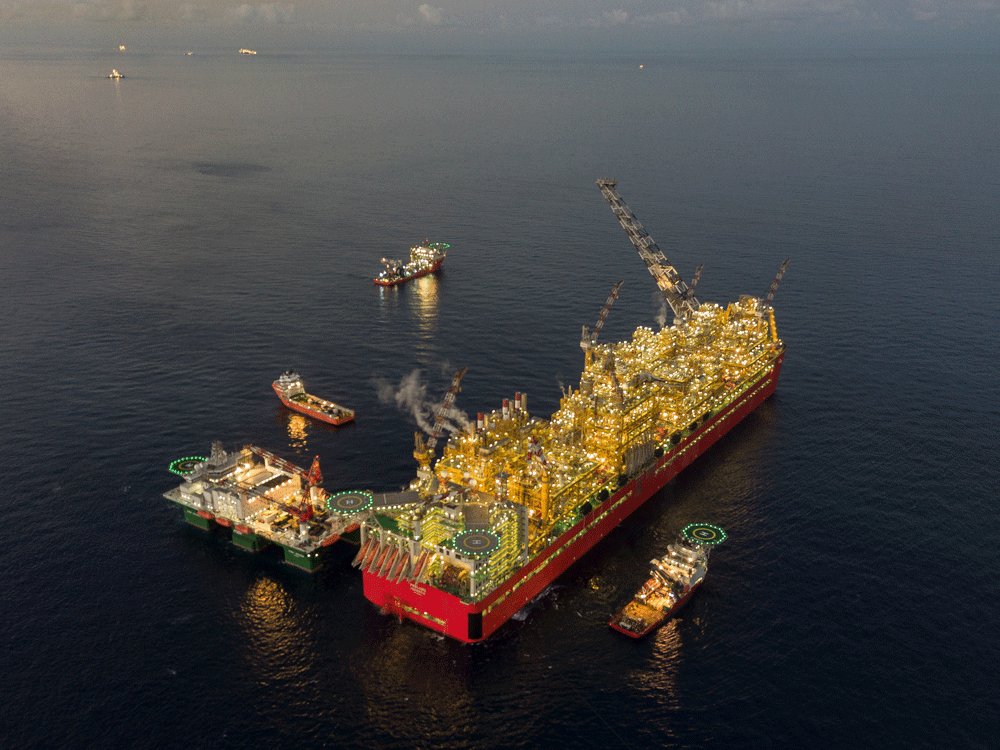
The number of floating LNG projects are increasing fast. Today’s liquefaction capacity is forecast to more than treble from 16 million to 55 million tonnes by 2040.
The first wind turbines to be deployed are reaching the end of their operational life. The question is, should the sites be re-used or retired?

Seawork brings maritime expertise and careers focus to Southampton. The annual event combines international exhibitors with strong Solent connections.
Browse papers from our conferences such as Wind Propulsion and Warship, showcasing cutting edge research vital to the future of maritime.
Or discover peer reviewed technical papers from the annual RINA Transactions.

Our peer-reviewed journals, IJME and our annual transactions, share relevant research from the fields of naval architecture and marine engineering. Enabling professionals, academics, and students to exchange ideas, present findings, and push the boundaries of innovation.

Keep up to date on the latest news, insights and innovations from across the maritime community. Our flagship title, The Naval Architect, covers everything from commercial shipping and small craft to defence and advanced design, while our yearly publication Significant Ships, showcases the most innovative and commercially important vessel designs of the prior year.

Stay connected with the global maritime community through RINA’s newsletters.
Whether you are a member or not, you can receive updates from The Naval Architect, alongside selected RINA news, events and industry insights. Members also gain access to a wider portfolio of exclusive newsletters on key topics in the maritime industry.

Discover the Royal Institution of Naval Architects’ rich history through our archives. Explore past issues of our journals, and historical records that reflect over 160 years of innovation and advancement in naval architecture and maritime engineering.