Sallaum Lines moves in on net-zero with newbuild PCTC Ocean Breeze
A series of six LNG-enabled pure car and truck carriers are set to play a crucial role in Sallaum Lines’ efforts to decarbonise its transportation operations
The Naval Architect provides in-depth information on all aspects of vessel design, construction and engineering. Practical applications of latest technology and case studies are accompanied by analysis and foresights. Published every two months, the magazine covers everything from superyachts and short-hop ferries to tankers and heavy-lift vessels; from battery pack installations and sail-assisted solutions to LNG tank retrofits; and from offshore safety to warship resilience.

A series of six LNG-enabled pure car and truck carriers are set to play a crucial role in Sallaum Lines’ efforts to decarbonise its transportation operations

The US Navy is pioneering a new approach to shipbuilding with its Landing Ship Medium (LSM) programme, an approach it hopes will enable it to quickly bring large numbers of newbuilds into service on time and on budget

Outfitted in the Netherlands, with a hull built in China, Somtrans’ new bunker barge, United LNG I, will help the company to extend its LNG bunkering capacity across various Belgian and Dutch seaports

The forthcoming Oceanus17 USV from UK-based ZeroUSV will incorporate most of the components and design features that characterised its earlier, smaller, Oceanus12 model, speeding up the design, engineering and build phases

Sealartec's radical ALR-S technology can convert a conventional ship's stern ramp to a fully autonomous recovery system for unmanned surface vessels

The UK-based ROC + DOCK project has brought together remote-controlled operations, a dual-function simulator and a ‘hands-off’ docking station, to encourage force multiplication of uncrewed vessels in ports and harbours

The latest addition to Bernhard Schulte Offshore’s CSOV fleet, Windea Clausius, combines a methanol-ready hybrid propulsion plant with Ulstein’s Twin X-STERN design for energy efficiency and ease of operations

We've seen wingsails applied to bulkers and tankers - but aboard a smaller patrol boat? The latest design from MAURIC, set for launch in 2027, could open up an entirely new market for wind-assisted propulsion systems

Singapore-based shipbuilder Strategic Marine has signed a memorandum of understanding with US-based Eureka Naval Craft to collaborate on the construction of the first Aircat Bengal MC Modular Attack Surface Craft.
Read stories from across our global community, including our new specialist e-newsletters across Power & Sustainability, Ship Repair & Maintenance, Warship Technology, Ferries & Fast Craft and Offshore Technology.
Explore the emergent engineering challenges shaping vessel architectures, from integrated electric propulsion and advanced control systems to autonomy‑enabling sensor suites and evolving regulatory frameworks. Register now for Advanced Maritime Technology Expo & Conference, 16–18 June 2026 in Amsterdam.

BMT’s new Digital Innovation & Simulation Centre (DISC) aims to reshape how naval architects design, test and validate vessels. In this exclusive interview, discover how it uses immersive simulation to de-risk decision-making
Cyberattackers are streamlining tactics and adopting new technologies to expand their capabilities. Pole Star Defense talks to RINA exclusively on why embedding cyber resilience into warship design from the outset is critical

In light of growing maritime autonomy across the defence sector, RINA questions AI developer MarineAI on how autonomous systems can complement warship capability and streamline decision-making, rather than replace the process

RINA is delighted to introduce two new tiers for those with expertise outside of our core of naval architecture and maritime engineering. The new tiers recognise the indisputable value of associated disciplines to maritime innovation and the need for interdisciplinary collaboration.

A surge in vessel building in the first 10 years of this century means that vessels are now approaching their third, fourth or fifth surveys, and they must meet evolving decarbonisation regulations to remain viable

AI is emerging as a legitimate tool for predictive maintenance, analysing component wear and tear symptoms for improved maintenance downtime costs

The latest survey shows significant deficiencies in ballast water systems technology. Can land-based facilities help bridge gap between rules and reality?
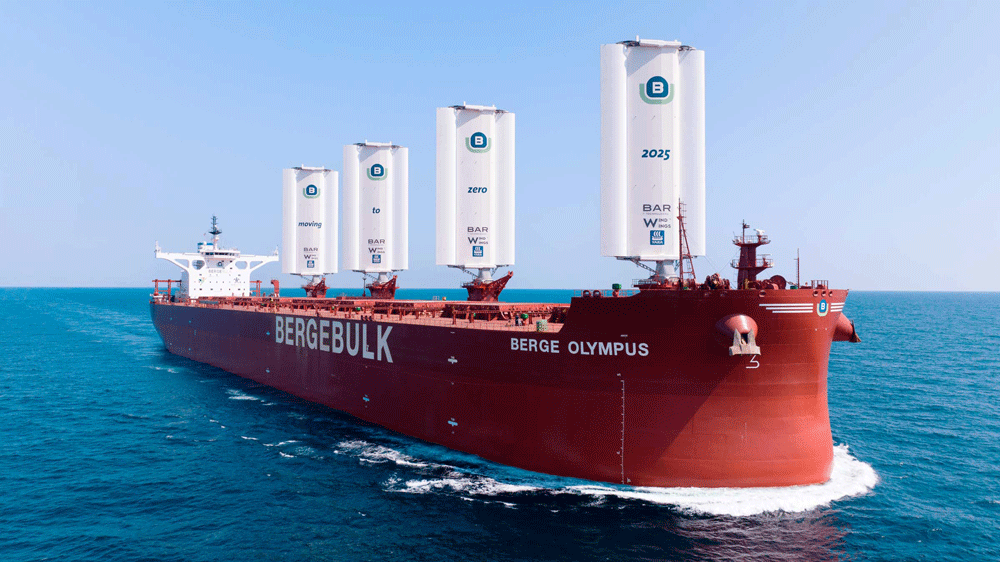
Full slots in a building boom for shipyards has seen concerns over unfamiliar wind power, added to vessel designs, with yards refusing to build to non-standard plans, rejecting orders. Two owners describe how they have managed to persuade yards otherwise

Advances in battery technology make it possible for short-sea ships and feeder vessels to electrify. That simultaneously offers the possibility to cut costs and emissions and improve vessel efficiency
Browse papers from our conferences such as Wind Propulsion and Warship, showcasing cutting edge research vital to the future of maritime.
Or discover peer reviewed technical papers from the annual RINA Transactions.

Our peer-reviewed journals, IJME and our annual transactions, share relevant research from the fields of naval architecture and marine engineering. Enabling professionals, academics, and students to exchange ideas, present findings, and push the boundaries of innovation.

Keep up to date on the latest news, insights and innovations from across the maritime community. Our flagship title, The Naval Architect, covers everything from commercial shipping and small craft to defence and advanced design, while our yearly publication Significant Ships, showcases the most innovative and commercially important vessel designs of the prior year.
Stay connected with the global maritime community through RINA’s newsletters.
Whether you are a member or not, you can receive updates from The Naval Architect, alongside selected RINA news, events and industry insights. Members also gain access to a wider portfolio of exclusive newsletters on key topics in the maritime industry.

Discover the Royal Institution of Naval Architects’ rich history through our archives. Explore past issues of our journals, and historical records that reflect over 160 years of innovation and advancement in naval architecture and maritime engineering.
