Living with 10-year-olds
Vessel owners of 10-year-old ships are going through a mid-life crisis. To retrofit or not to retrofit, that is the question? Can investments in energy savings be recovered in these not old, but not new ships.
Read stories from across our global community, including our new specialist e-newsletters across Power & Sustainability, Ship Repair & Maintenance, Warship Technology, Ferries & Fast Craft and Offshore Technology.

Vessel owners of 10-year-old ships are going through a mid-life crisis. To retrofit or not to retrofit, that is the question? Can investments in energy savings be recovered in these not old, but not new ships.
The digital age is transforming the ship repair industry as online monitoring and digital twins linked to a burgeoning predictive maintenance regime takes hold.

Visibility is becoming increasingly critical as charterers must now calculate Scope 3 emissions from their supply chains. Speed optimisation is helping to reduce the total.
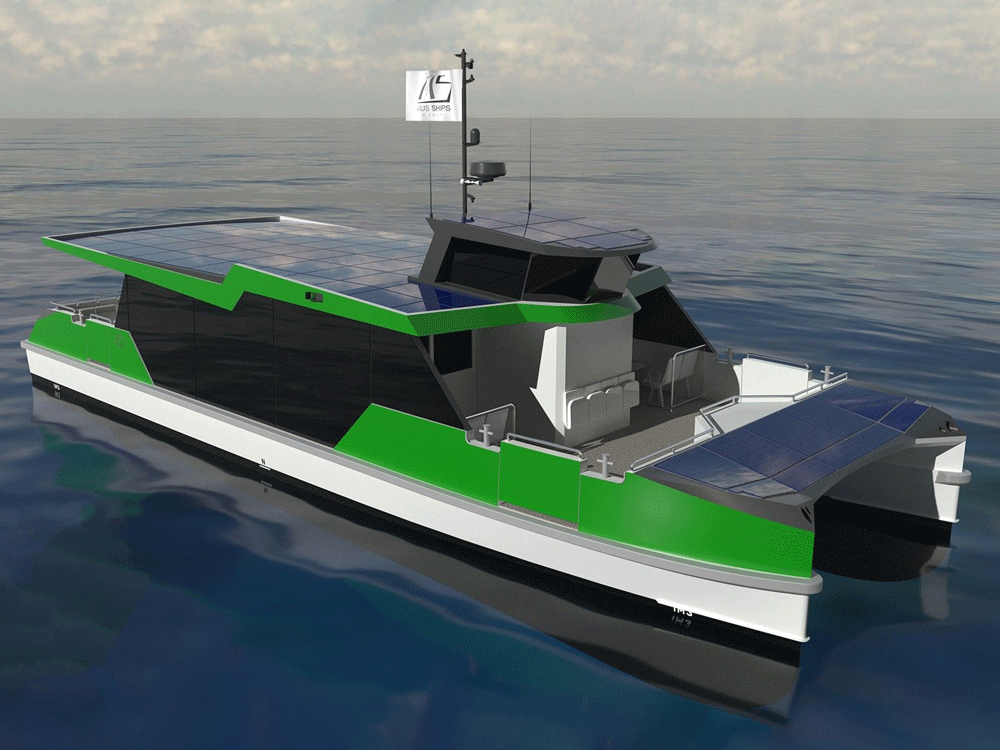
Australia’s first 100% electrically driven passenger ferry, a collaboration between Aus Ships and Volvo Penta, aims to validate scalable electric marine propulsion with the overall aim of decarbonising the country’s waterways.

Can diagonal deflector strakes solve the classic deep-vee compromise? Petestep’s hull technology is promising faster planing, lower slamming loads and efficiency gains across the fast craft market.

Battery specialist Corvus Energy discusses how it is working on large-scale battery integration projects that reshape weight distribution and stability design in high capacity ferries and fast craft.

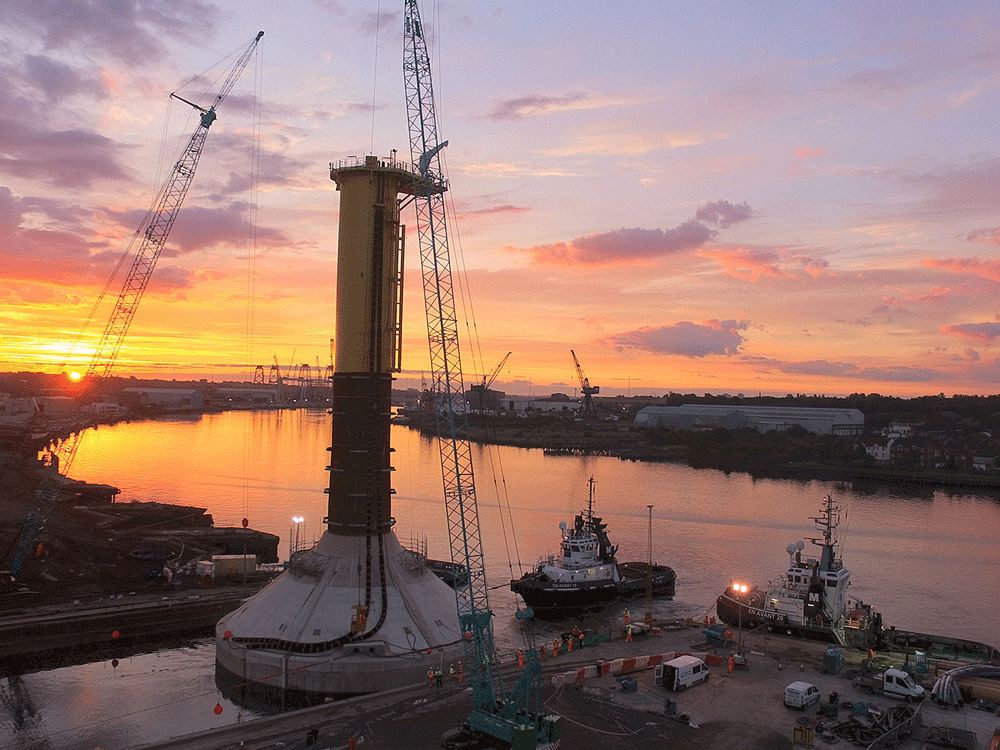
A new era in offshore power has seen the development of the first Energy Islands off European coasts. The first will be the six-hectare Princess Elisabeth Island, which is under construction 45km off the coast of Belgium and is due to be completed in 2028.
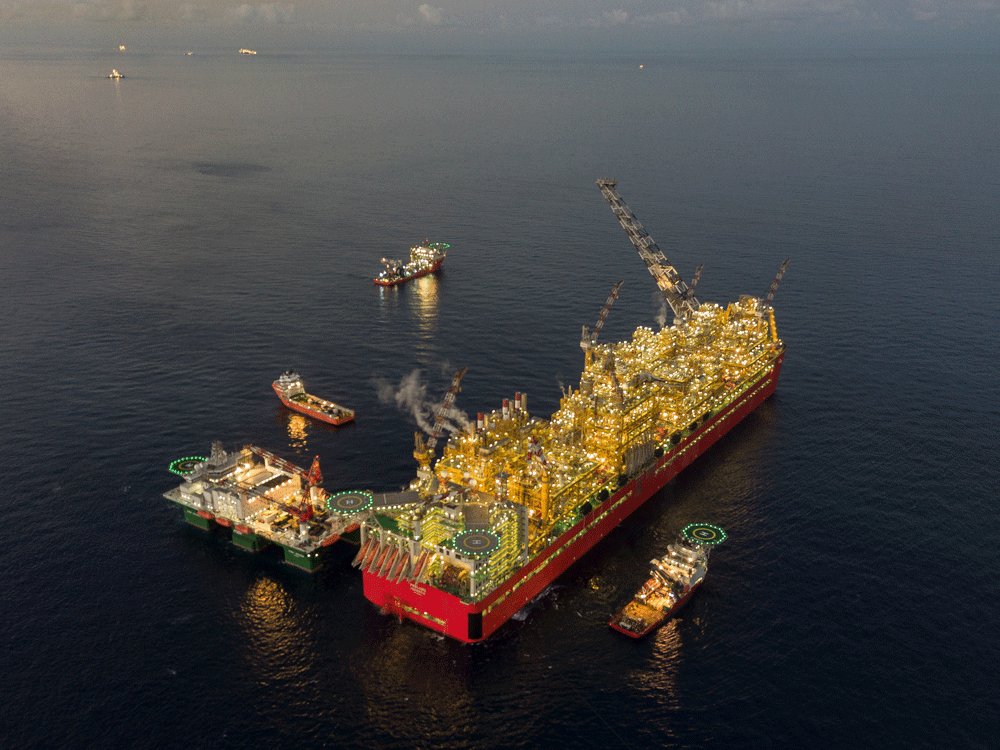
The number of floating LNG projects are increasing fast. Today’s liquefaction capacity is forecast to more than treble from 16 million to 55 million tonnes by 2040.
The first wind turbines to be deployed are reaching the end of their operational life. The question is, should the sites be re-used or retired?

Seawork brings maritime expertise and careers focus to Southampton. The annual event combines international exhibitors with strong Solent connections.
A clear path to decarbonisation is not yet available but MEPC 84 has given a clear direction of travel. While attempts to sink the NZF have apparently failed, putting its proponents in the driving seat, technical discussions – unlike the political debate – carry on regardless.
The conflict in Iran has seen some unintended consequences, driving up fossil fuel costs and making alternative fuels viable. At the same time, it is fuelling interest in vessel efficiency and raising the prospects of more fuels in the mix.
Make sure you're the first to hear about the latest news and developments in the maritime industry!
Our eNewsletters are available to both members and non-members, giving regular updates on technical developments in the industry, forthcoming Events, networking opportunities and much more!
